TD N°6
ASSERVISSEMENT DE POSITION AVEC CORRECTEUR PI
Nous allons étudier la synthèse d'un correcteur PI pour l''asservissement de position d'un bras de robot en utilisant cette fois le diagramme de Bode
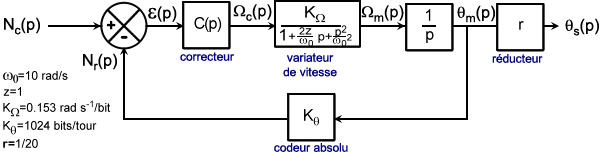
\(\Omega_c\) est la consigne de vitesse sur 10 bits transmise au variateur par un bus CAN
C(p) est le correcteur Proportionnel et Intégrale \(C(p)=A\frac{1+\tau_ip}{\tau_ip}\)
I. - Correction proportionnelle
\(\:\)
Question
I.1 - Montrer que \(H_{bo}(p)\) peut se mettre sous la forme \(H_{bo}(p)=\frac{K}{\frac{p}{\omega_0}(1+\frac{2z}{\omega_0}p+\frac{p^2}{\omega_0^2})}\)
Exprimer K en fonction de A
Solution
\(K=\frac{A K_\omega K_\theta}{\omega_0}\) = 2.5A
Question
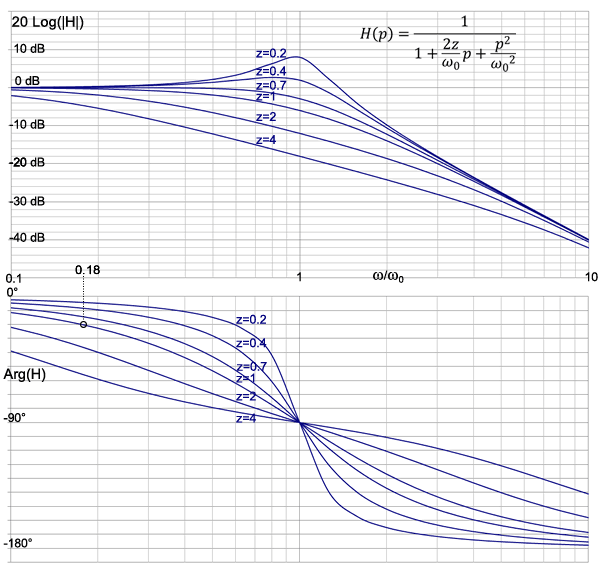
I.2 - On cherche à obtenir une marge de phase \(\varphi_m=70\)°. L'argument de \(H_{bo}(p)\) doit donc valoir -180°+70°=-110°
Quel doit-être l'argument de \(\frac{K}{(1+\frac{2z}{\omega_0}p+\frac{p^2}{\omega_0^2})} \) ?
Sur le diagramme de Bode ci-dessous, déterminer la valeur de \(\omega\) respectant cette condition (pour rappel z=1). On notera cette valeur \(\omega_{0dB}\)
Solution
L'argument de \(\frac{1}{(\frac{p}{\omega_0})}\) est de -90° (imaginaire pur négatif) donc l'argument de \(\frac{K}{(1+\frac{2z}{\omega_0}p+\frac{p^2}{\omega_0^2})}\)doit valoir -180°+70°+90°=-20°
Pour Arg=-20°, on trouve une pulsation réduite \(\frac{\omega_{0dB}}{\omega_{0}}\)=0.18
Question
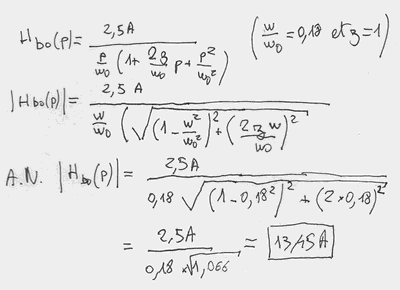
I. 3 - Calculer le gain de \(H_{bo}(p)\) pour cette pulsation \(\omega_{0dB}\) en fonction de A
Solution
La pulsation \(\omega_{0dB}\) vaut 0.18 x10=1.8 rad/s... \(|H_{bo}(p)|\) = 13.45A
Question
I.4 - Pour la pulsation \(\omega_{0dB}\), le gain doit être de 0 dB, déterminer la valeur de A assurant une marge de phase \(\varphi_m=70\)°
Solution
\(A=\frac{1}{13.45}=0.074\)
II - Correction proportionnelle-intégrale
\(\:\)
Question
II.1 - Pour le gain A calculé précédemment, déterminer la constante de temps \(\mathcal{T}_i\) d'un correcteur intégral adapté au système et permettant de conserver une marge de phase au moins égale à 65°.
Solution
L'apport du terme \(\frac{1+\mathcal{T}_ip}{\mathcal{T}_ip}\) fait perdre 5° à l'argument de Hbo(p) pour la pulsation ω0dB (voir Q1.4) puisque la marge de phase passe de 70° à 65°
Donc \(Arg(\frac{1+j\mathcal{T}_i\omega_{0dB}}{j\mathcal{T}_i\omega_{0dB}})=-5°\)
\(\Rightarrow arctg(\mathcal{T}_i\omega_{0dB})-90°=-5°\)
\(\Rightarrow \mathcal{T}_i\omega_{0dB}=tg 85°\)
\(\Rightarrow \mathcal{T}_i=\frac{11.43}{1.8}=6.35s\)
Question
II.2 -
Quelle sera l'erreur en régime établi pour un échelon de consigne ? Pour une rampe de consigne ?
Comparer les résultats à ceux du TD n°3 et expliquer la cause des différences.
Solution
- L'erreur en régime établi pour un échelon (t0) ou une rampe (t1) de consigne est nulle puisqu'il y a 2 intégrateurs dans la boucle (1 naturel et 1 dans le correcteur)
- Dans le TD n°3, il n'y avait qu'un intégrateur naturel