TD N°5
ASSERVISSEMENT DE VITESSE D'UN MOTEUR À COURANT CONTINU
Un servomoteur entraîne une charge à vitesse variable. La mesure de la vitesse de rotation est réalisée par une génératrice tachymétrique montée directement sur l'arbre moteur. L'ensemble est contrôlé par une boucle de
régulation stabilisée par un correcteur proportionnel-intégral.
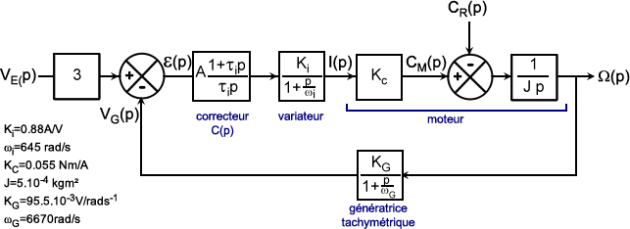
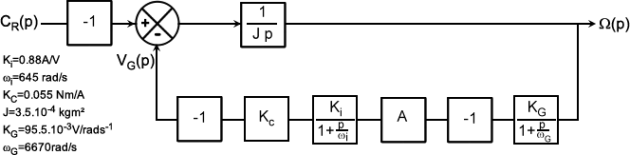
La boucle de régulation permettant d'asservir la vitesse de la charge est représentée ci-dessous :
I. - Correction proportionnelle
\(\:\)
Question
I.1 - Pour un gain proportionnel C( p)= A, déterminer l'expression de la fonction de transfert en boucle ouverte \(H_{bo}(p)=\frac{V_G(p)}{\varepsilon(p)}\)
Solution
\(H_{bo}(p)=\frac{AK_iK_cK_G}{(1+\frac{p}{\omega_i})(J p)(1+\frac{p}{\omega_G})}\)=\(\large\frac{9.25 A}{p(1+\frac{p}{\omega_i})(1+\frac{p}{\omega_G})}\)
Question
I.2 - Montrer que Hbo(p) peut se mettre sous la forme normalisée :
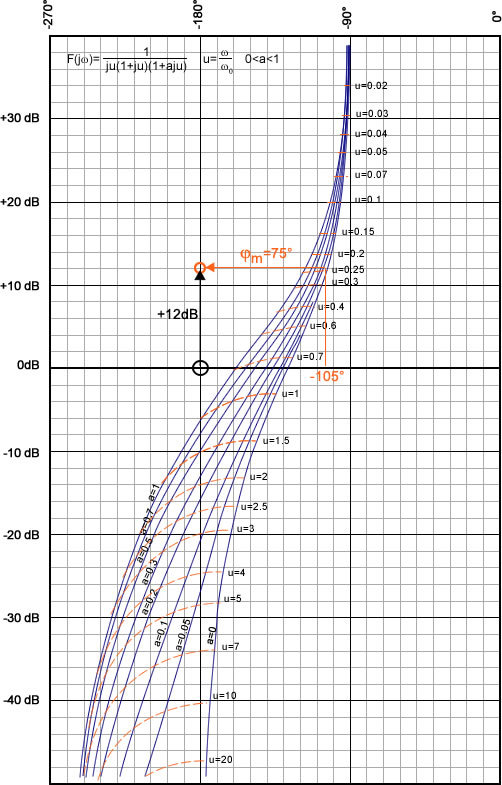
\(H_{bo}(j\omega)=\frac{AK}{\frac{j \omega}{\omega_0}(1+\frac{j\omega}{\omega_0})(1+a\frac{j\omega}{\omega_0})}\) - Calculer K,\(\omega_0\) et a (0<a<1)
Indice
\(\frac{AK_iK_cK_G}{(1+\frac{p}{\omega_i})(J p)(1+\frac{p}{\omega_G})}=\frac{AK}{\frac{j \omega}{\omega_0}(1+\frac{j\omega}{\omega_0})(1+a\frac{j\omega}{\omega_0})}\)
Il faut faire apparaitre \(j\omega_0\) dans les 3 termes du dénominateur
A priori , il y a 2 solutions : soit ω0=ωi soit ω0=ωG, on compensera l'autre facteur avec le coefficient a
On choisira la solution telle que 0<a<1
Solution
\( \omega_0=645 rad/s - K=0.0143 - a=0.1\)
Question
Question
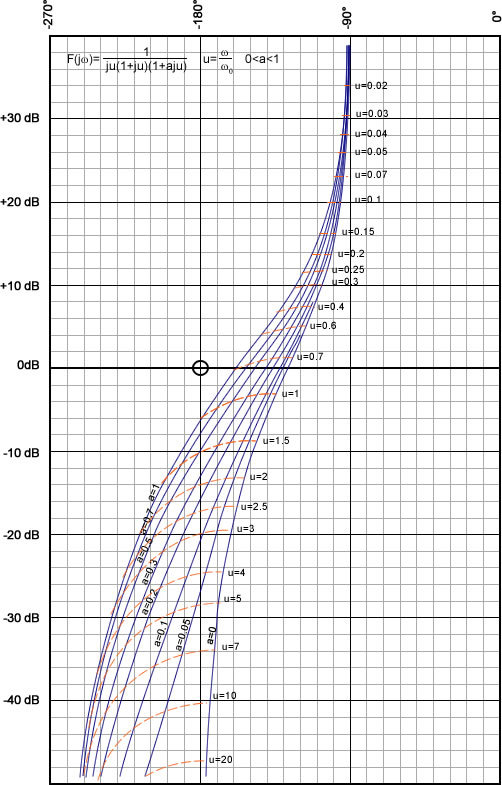
I.4 - En utilisant l'abaque en annexe, tracer le lieu de Black de \(H_{bo}(j\omega)\) et Déterminer la valeur du gain proportionnel A assurant une réponse stable en boucle fermée, avec une marge de phase supérieure ou égale à 75°.
Déterminez alors la valeur de la marge de gain \(g_m\)
Solution
On observe qu'il faudrait décaler l'axe horizontal de 12 dB vers le haut pour avoir une marge de phase de 75° (l'argument de H doit valoir -105°)
Ceci revient à décaler la courbe de H vers le bas de 12 dB
(Notons au passage que le gain de 0dB sera alors atteint pour une pulsation réduite u de 0.25, c'est à dire ω0dB=645 * 0.25 rad/s= 160 rad/s)
Le numérateur des abaques vaut 1
Le numérateur de H doit donc valoir \(10^{\frac{-12}{20}}=0.25\)
Pour nous le numérateur est AK, avec K=0.0143
Finalement la valeur de A nécessaire est A=0.25/0.0143=17.5
La marge de gain est alors \(g_m=32 dB\) (valeur élevée !)
Question
I.5 - À partir de la position de l'intégrale naturelle présente dans le système, déterminer si le système présentera une erreur pour une consigne de type échelon et en l'absence de couple résistant.
L'ajout d'un couple résistant introduira-t-elle une erreur supplémentaire ?
Solution
- Pas de perturbation, 1 intégrateur \(\Rightarrow\) l'erreur en régime permanent pour un échelon de consigne est nulle
- L'intégrateur est situé en aval de la perturbation, l'erreur en régime permanent avec couple résistant sera non nulle
Question
I.6 - Calculer la vitesse à vide en régime établi lorsque l'entrée de consigne reçoit un échelon de tension d'amplitude 10V.
Solution
A vide, l'erreur est nulle, pas besoin de calcul compliqué : 3VE=KG \(\Omega\) donc \(\Omega=\frac{3*10}{0.0955}\)=314 rad/s (=3000tr/min)
Question
I.7 - Déterminer l'écart sur la sortie en régime permanent en présence d'un échelon de couple résistant égal à
0.12 N.m. Exprimer cet écart en % de la vitesse à vide. Est-il significatif ?
Indice
Il faut redessiner le schéma fonctionnel avec CR(p) pour consigne et VE(p)=0
Solution
\(\frac{\Omega(p)}{C_R(p)}=-\frac{1}{AK_IK_CK_G}\frac{(1+\frac{p}{\omega_I})(1+\frac{p}{\omega_G})}{1+J/(AKiKcKg)p+J/(AKiKcKg)(\frac{1}{\omega_i}+\frac{1}{\omega_G})p^2+\frac{J/(AKiKcKg)}{\omega_i\omega_G}p^3}\)
\(\Omega(p)= -\frac{0.12}{p}\frac{1}{AK_IK_CK_G}\frac{(1+\frac{p}{\omega_I})(1+\frac{p}{\omega_G})}{1+J/(AKiKcKg)p+J/(AKiKcKg)(\frac{1}{\omega_i}+\frac{1}{\omega_G})p^2+\frac{J/(AKiKcKg)}{\omega_i\omega_G}p^3}\)
\(\lim\limits_{t \rightarrow +\infty} \Omega(t)=\lim\limits_{p \rightarrow 0}p \Omega(p)=-\frac{0.12}{AK_IK_CK_G}=-1.5rad/s\)
ΔΩ∞=-1.5 rad/s par rapport à 314 rad/s : on perd 0.48% ce qui pourrait sembler acceptable
II - Correction proportionnelle-intégrale
\(\:\)
Question
II.1 - Pour le gain A calculé précédemment, déterminer la constante de temps \(\mathcal{T}_i\) d'un correcteur intégral adapté au système et permettant de conserver une marge de phase au moins égale à 70°.
Solution
L'apport du terme \(\frac{1+\mathcal{T}_ip}{\mathcal{T}_ip}\) fait perdre 5° à l'argument de Hbo(p) pour la pulsation ω0dB (voir Q1.4) puisque la marge de phase passe de 75° à 70°
Donc \(Arg(\frac{1+j\mathcal{T}_i\omega_{0dB}}{j\mathcal{T}_i\omega_{0dB}})=-5°\)
\(\Rightarrow arctg(\mathcal{T}_i\omega_{0dB})-90°=-5°\)
\(\Rightarrow \mathcal{T}_i\omega_{0dB}=tg 85°\)
\(\Rightarrow \mathcal{T}_i=\frac{11.43}{160}=0.071s\)
Question
II.2 - Quelle est la conséquence de l'ajout de cette action intégrale sur l'erreur introduite par un échelon de couple résistant ? Quelle serait l'erreur si l'on sollicitait le système avec pour consigne une rampe et en présence d'un échelon de couple résistant ?
Solution
- Pour un échelon de couple résistant, la vitesse ne chutera plus car l'intégrateur est en amont de la perturbation
- Pour une rampe de consigne (en t1) il faudrait 2 intégrateurs pour annuler l'erreur, ce n'est pas le cas, il y aura une erreur de traînage