TD N°3
ASSERVISSEMENT DE POSITION
L'asservissement de position d'un axe de robot est modélisé par le schéma suivant :
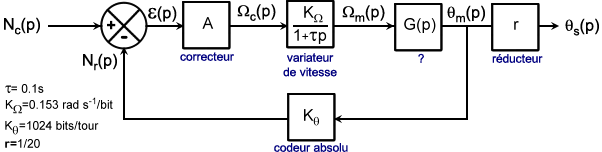
Nc est la consigne de position sous forme numérique, issue d'un pupitre
Ωc est la consigne de vitesse sur 10 bits transmise au variateur par un bus CAN
Question
1 - Donnez les avantages et inconvénients de placer le codeur de position en entrée ou en sortie du réducteur
Solution
- codeur en entrée du réducteur : la précision ou la résolution de la mesure sera meilleure : 1024 impulsions pour 1/20 de tour d'axe au lieu de 1024 impulsion pour 1 tour
- codeur en sortie du réducteur : la position réelle de l'axe est mesurée, utile en cas de jeu d'engrenage du réducteur
Question
2 - Quelle opération mathématique permet de transformer la vitesse de rotation en position angulaire ?
Déterminer alors l'expression de G(p)
Solution
Il faut intégrer la vitesse pour obtenir la position
donc : \(G(p)=\frac{1}{p}\)
Question
3 - Calculez la fonction de transfert en boucle fermée \(H_{bf}(p)=\frac{\theta_m(p)}{N_c(p)}\) en fonction de A.
Le dénominateur de \(H_{bf}(p)\) sera exprimé sous la forme d'un polynôme en p dont le terme constant sera égal à 1.
Solution
\(H_{bf}(p)=\frac{H}{1+KH}=\frac{AK_\Omega}{AK_\Omega K_\theta +p+\mathcal{T} p²}=\frac{1}{K_\theta}\frac{1}{1+\frac{1}{A K_\Omega K_\theta}p+\frac{\mathcal{T}}{A K_\Omega K_\theta }p^2}\)
Question
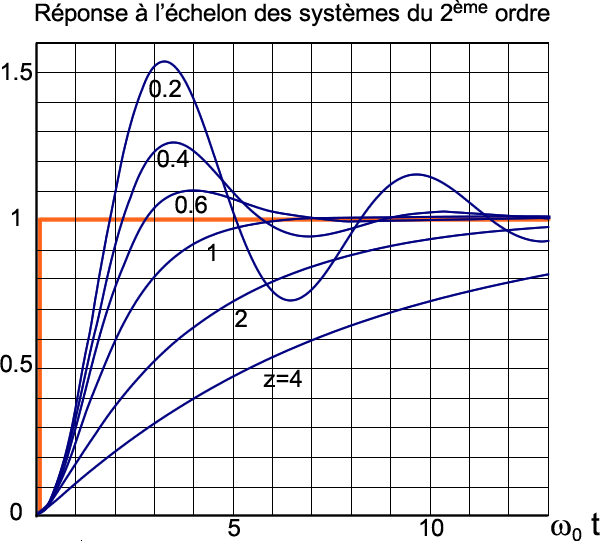
4 - Montrer que \(H_{bf}(p)\) peut se mettre sous la forme \(H_{bf}(p)=\frac{K}{1+\frac{2z}{\omega_0}p+\frac{p^2}{\omega_0^2}}\)
Exprimer K, z et ω0 en fonction de A, KΩ, Kθ,\(\mathcal{T}\) Calculer K, z et ω0 en fonction de A
Solution
K=\(\frac{1}{K_\theta}=\frac{1}{\frac{1024}{2\pi}}=0.006136\:rad/bit\) \(\omega_0=\sqrt{\frac{AK_\Omega K_\theta}{\tau}}=15.8\sqrt{A}\:rad\: s^{-1} \)
\(z=\sqrt{\frac{1}{4 A K_\Omega K_\theta \mathcal{T}}}=\frac{0.316}{\sqrt{A}} \)
Question
5 - Exprimez l'erreur ε(p) en fonction de Nc(p) (utiliser Hbf(p))
Déterminez alors l'erreur en régime permanent \(\varepsilon_\infty\) pour un échelon de consigne d'amplitude 10 bits
Solution
\(\varepsilon_{(p)}=N_c(p)\frac{\frac{2z}{\omega_0}p+\frac{p^2} {\omega_0^2}}{1+\frac{2z}{\omega_0}p+\frac{p^2}{\omega_0^2}}\)
\(\varepsilon_\infty=\lim\limits_{t \rightarrow +\infty}\varepsilon(t)=\lim\limits_{p \rightarrow 0}p \varepsilon(p)=\lim\limits_{p \rightarrow 0}p\frac{10}{p}\frac{\frac{2z}{\omega_0}p+\frac{p^2}{\omega_0^2}}{1+\frac{2z}{\omega_0}p+\frac{p^2}{\omega_0^2}}=0\)
L'erreur statique de position pour un échelon de consigne est nulle, indépendamment de A ( ceci est dû à l'intégrateur G(p) comme nous le verrons plus tard)
Question
6 - Sur un axe de robot, pour un échelon de consigne, un dépassement de la sortie pourrait occasionner des dégâts ;
Quelle valeur doit-on donner au coefficient d'amortissement z pour obtenir une réponse rapide sans dépassement ?
Quelle doit-être la valeur de A correspondante ?
Quel sera alors le temps de réponse à 90% pour un échelon de consigne ?
Solution
z=1 donc A=0.1 et ω0=5 rad/s
Le temps de réponse à 90% correspond à ω0 tr=4 soit tr= 800ms
Question
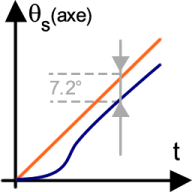
7 - Pour A= 0,1 déterminer l'erreur de traînage en régime permanent \(\varepsilon_\infty\) pour une rampe de consigne d'amplitude 1024 t
Solution
\(\varepsilon_\infty=\lim\limits_{t \rightarrow +\infty}\varepsilon(t)=\lim\limits_{p \rightarrow 0}p \varepsilon(p)=\lim\limits_{p \rightarrow 0}p\Large\frac{1024}{p^2}\frac{\frac{2z}{\omega_0}p+\frac{p^2}{\omega_0^2}}{1+\frac{2z}{\omega_0}p+\frac{p^2}{\omega_0^2}}\)
\(=1024\frac{2z}{\omega_0}=\:409.6\:bits\)
ce qui correspond à \(\frac{409.6}{1024}=\frac{1}{2.5}\: tour\:moteur=144°\:moteur=7.2°\:axe\)