TD N°2
ASSERVISSEMENT DE VITESSE
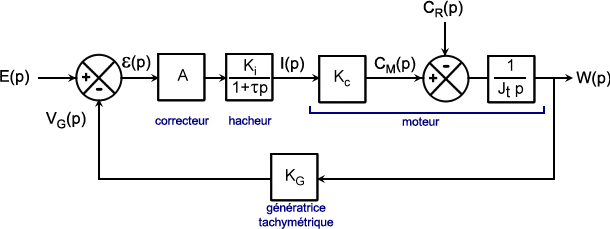
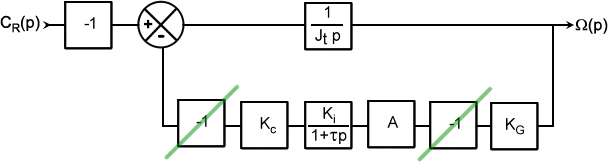
L'asservissement de vitesse d'un moteur à courant continu est modélisé par le schéma suivant :
I. - Étude à vide
CR(p)=0
Question
I.1 - Quelle est la fonction réalisée par le bloc \({\frac{1}{J_tp}}\)?
Solution
Il s'agit d'un bloc intégrateur,
d'après le P.F.D. : \(C_M-C_R=J\frac{d\Omega}{dt}\)
Question
I.2 - Exprimer la fonction de transfert en boucle ouverte \(H_{BO}(p)=\frac{V_G(p)}{\varepsilon p)}\)
Exprimer cette fonction de transfert sous forme numérique avec :
A=1
Ki=1A/V
Kc=2Nm/A
Jt=0,01 kgm²
Kg=0.0637 V/(rad/s)
\(\mathcal{T}\)=0.01s
Solution
\(H_{BO}(p)=\frac{AK_iK_cK_g}{J_tp(1+\mathcal{T} p)}=\frac{12.7}{p(1+0.01p)}\)
Question
I. 3 - À vide, calculer la fonction de transfert en boucle fermée \(H_{BF}(p)=\Large\frac{\Omega(p)}{E(p)}\)
Les numérateur et dénominateur seront ordonnés selon les puissances croissantes de p.
Solution
\(H_{BF}(p)=\frac{H}{1+KH}=\frac{AK_iK_c}{AK_iK_cK_g+J_tp+J_t\mathcal{T}p²}=\frac{1}{K_g}\frac{1}{1+\frac{J_t}{AK_iK_cK_g}p+\frac{J_t\mathcal{T}}{AK_iK_cK_g}p^2}\)
Question
I.4 - Montrer que \(H_{BF}(p)\) peut se mettre sous la forme \(H_{BF}(p)=\frac{K}{1+\frac{2z}{\omega_0}p+\frac{p^2}{\omega_0^2}}\)
Exprimer K, z et ω0 en fonction de A, Ki, Kc, Jt,\(\mathcal{T}\) et KG. Calculez K, z et ω0
Quelle est l'influence de A sur z et ω0 ?
Solution
K=\(\frac{1}{K_g}=15.7V/rad\: s^{-1}\)
\(\omega_0=\sqrt{\frac{AK_iK_cK_g}{J_t\mathcal{T}}}=35.7\sqrt{A}\:rad\: s^{-1} \)
\(z=0.5\sqrt{\frac{J_t}{AK_iK_cK_g\mathcal{T}}}=1.4/\sqrt{A} \)
Plus A augmente, plus ω0 augmente : le système devient plus rapide
Plus A augmente, plus z diminue : le système devient moins stable
Question
I.5 - On applique un échelon d'amplitude 10V sur la consigne : Déterminer l'expression de Ω (p)
Solution
\(\Omega(p)=\frac{10}{p}\frac{K}{1+\frac{2z}{\omega_0}p+\frac{p^2}{\omega_0^2}}\)
Question
I.6 -En appliquant le théorème de la valeur finale, déterminer Ω∞ la valeur finale de Ω(t)
Indice
\(\lim\limits_{t \rightarrow +\infty} \Omega(t)=\lim\limits_{p \rightarrow 0}p \Omega(p)\)
Solution
\(\Omega_\infty=\lim\limits_{t \rightarrow +\infty}\Omega(t)=\lim\limits_{p \rightarrow 0}p \Omega(p)=\lim\limits_{p \rightarrow 0}p\frac{10}{p}\frac{K}{1+\frac{2z}{\omega_0}p+\frac{p^2}{\omega_0^2}}=10K=157rad\: s^{-1}=1500 tr/min\)
Question
I.7 - Calculer l'erreur ε∞ en régime permanent
Solution
ε∞=10-Kg x157=0 , l'erreur est nulle
Ce n'est pas surprenant, le moteur est à vide, peut-être que si on applique un couple résistant, le moteur va ralentir...
II - Étude en charge
E(p)=0
Question
II.1 - En supposant E(p)=0, redessiner le schéma fonctionnel avec CR(p) pour entrée
Calculer la nouvelle fonction de transfert en boucle fermée \(H'_{BF}(p)=\Large\frac{\Omega(p)}{C_R(p)}\)
Les numérateur et dénominateur seront ordonnés selon les puissances croissantes de p.
Solution
\(H'_{BF}(p)=\frac{H}{1+KH}=-\frac{1+\mathcal{T} p}{AK_iK_cK_g+J_tp+J_t\mathcal{T} p²}=\frac{-1}{AK_cK_iK_g}\frac{1+\mathcal{T} p}{1+\frac{J_t}{AK_iK_cK_g}p+\frac{J_t\mathcal{T}}{AK_iK_cK_g}p^2}\)
Question
II.2 - Montrer que \(H'_{BF}(p)\) peut se mettre sous la forme \(H'_{BF}(p)=\frac{K'(1+\mathcal{T} p)}{1+\frac{2z}{\omega _0}p+\frac{p^2}{\omega _0^2}}\)
Exprimer K' en fonction de A, Ki, Kc et KG
Solution
\(K'=\frac{-1}{AK_iK_cK_g}=\frac{-7.85\: rad\: s^{-1}/Nm}{A} \)
z et ω0 sont inchangés par rapport à la partie I.
Le signe - indique que un couple résistant positif provoque une diminution de la vitesse ; logique, non ?
Question
II.3 - On applique un échelon de couple résistant CR= 1Nm ; Déterminer l'expression de Ω(p)
Solution
\(\Omega(p)=\frac{1}{p}\frac{K'(1+\mathcal{T} p)}{1+\frac{2z}{\omega_0}p+\frac{p^2}{\omega_0^2}}\)
Question
II.4 -En appliquant le théorème de la valeur finale, déterminer \(\Delta\Omega_\infty\) la valeur finale de la variation de Ω(t)
Calculer cet écart pour A=1 puis A=10
Quelle est l'influence de A sur la précision ?
Solution
ΔΩ∞=K'=-7.85 rad s-1/A
Pour A=1, ΔΩ=-7.85 rad/s (-5% par rapport à 157 rad/s)
Pour A=10, ΔΩ=-0.785rad/s (-0.5% par rapport à 157 rad/s)
Plus A est élevé, meilleure est la précision
Avec ce type de correcteur (P), l'erreur n'est jamais nulle !
Nous verrons plus tard un autre type de correcteur (PI) permettant d'annuler cette erreur
III - Diagrammes de Bode et Black
Calculs de nombres complexe avec calculatrice ou tableur
Question
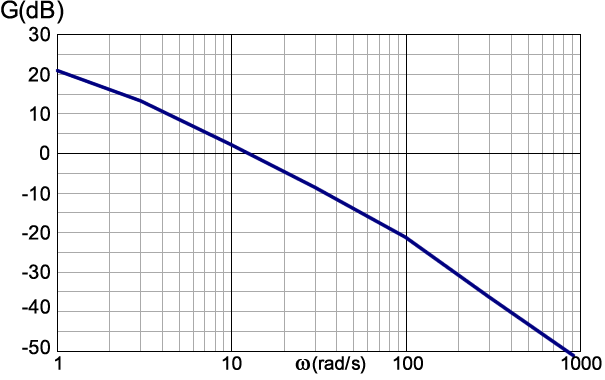
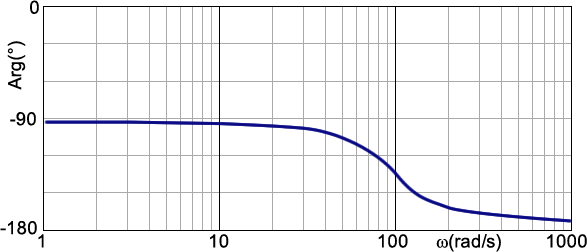
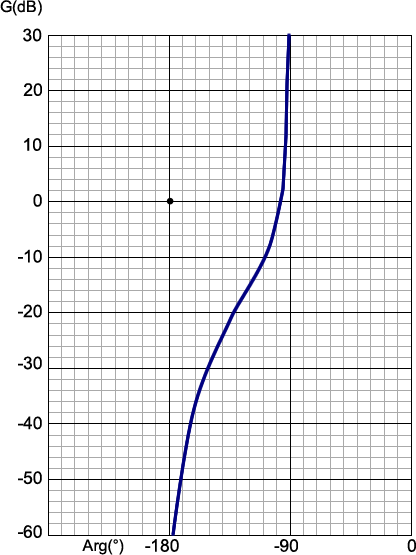
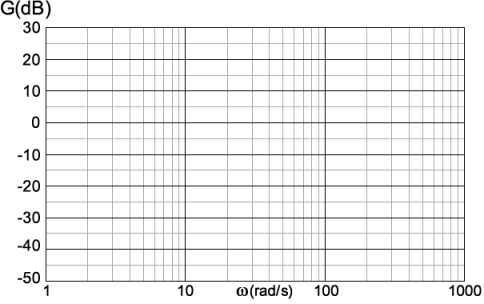
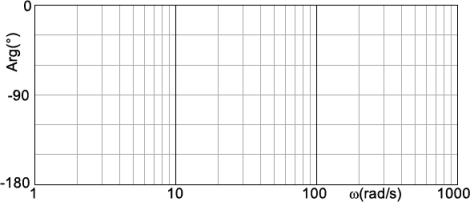
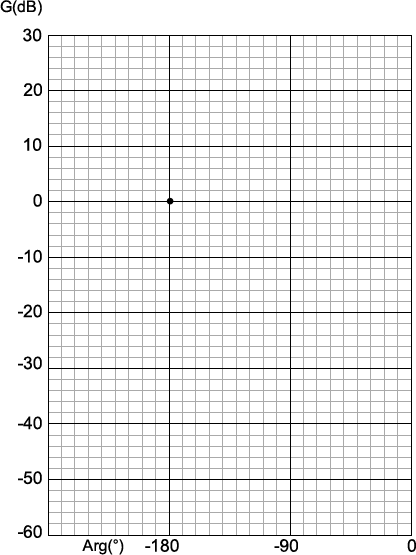
On considère la fonction de transfert \(H(p)=\large\frac{12.7}{p(1+0.01p)}\)
Calculer 20 log(|H|) et Arg(H) puis tracer les diagrammes de Bode et Black de H(p)
ω (rad/s) | 20 log(|H(jω)|) (dB) | Arg(H(jω)) (°) |
|---|---|---|
1 | ||
3 | ||
10 | ||
30 | ||
100 | ||
300 | ||
1000 |
Solution
ω (rad/s) | 20 log(||H(jω)|| (dB) | Arg(H(jω)) (°) |
|---|---|---|
1 | 22 | -91 |
3 | 13 | -92 |
10 | 2 | -96 |
30 | -8 | -107 |
100 | -21 | -135 |
300 | -37 | -162 |
1000 | -58 | -174 |